

DES ROBOTS QUI COOPÈRENT ENTRE-EUX !
La robotique est née à la fin des années 60 des travaux menés à l’université de stanford visant à constituer des machines douées d’« intelligence artificielle » leur conférant ainsi des facultés d’adaptation face à des environnements dynamiques et des informations incomplètes ou incertaines. ces capacités d’adaptation constituent une dimension essentielle des agents robotiques. elles doivent leur permettre d’une manière générale de donner une réponse fonctionnelle conforme et adéquate dans la situation observée, ceci par des ajustements physiques et/ou comportementaux.
Le tout premier robot capable d’adaptation fut Shakey qui pouvait effectuer des tâches nécessitant une planification de déplacements élémentaires dans un environnement simple. Shakey était équipé d’un calculateur SDS-940 de 64 Ko de mémoire et était programmé en LISP. Aujourd’hui, des véhicules routiers complètement robotisés, capables de s’adapter à la complexité du trafic routier, sont à la porte du marché des transports individuels.
Les clés de l’autonomie fonctionnelle
Les facultés d’adaptation dont peut bénéficier aujourd’hui un robot peuvent conduire à une autonomie fonctionnelle relativement élevée. Celle-ci se traduit par une adaptation à l’environnement des fonctions de commande motrice à partir d’informations fournies par des moyens de perception (on parle alors de commande référencée capteur). Pour réaliser une tâche, les actions motrices sont structurées sous la forme d’un enchaînement de fonctions élémentaires par des algorithmes de génération de plans (planificateurs). La commande motrice intègre non seulement les propriétés dynamiques du système moteur mais aussi les tâches à réaliser sous la forme de buts (de consignes). Les fonctions sensori-motrices ainsi construites présentent une certaine réactivité aux perturbations. Elles s’appuient pour cela sur un niveau intégratif qui gère et planifie les activités motrices sur la base de certaines représentations du monde extérieur. C’est par l’articulation de ce niveau de planification sur ces représentations des fonctions sensori-motrices que le système acquiert le pouvoir d’agir et non pas simplement de réagir. Il considère pour cela de manière prédictive, par projection et extrapolation sur des horizons différents, les effets des actions, et ainsi devient capable d’élaborer des projets d’action et de planifier leur exécution.
Par planification on comprend donc : proposer une organisation hiérarchisée des actions susceptibles de guider l’activité de l’agent vers un but (un mode opératoire pour résoudre un problème) mais également la mise en oeuvre de ce plan et son ajustement.
La synthèse d’activités motrices pour un robot, orientées par les tâches, est conditionnée par des contraintes intrinsèques au système et par celles de l’environnement. Elle peut être réalisée sous une forme générique en s’appuyant sur différentes techniques de commande, comme la commande prédictive. Ces fonctions motrices s’appuient, comme nous venons de l’évoquer, sur diverses formes de perception embarquée. Aussi, un système robotique intègre-t-il un ensemble de capteurs dont les données capturées sont traitées à bord par des calculateurs embarqués pour élaborer une représentation de son état et de l’environnement. Ces informations sont ensuite utilisées par des algorithmes de commande référencée capteur ou par des boucles de niveau supérieur pour évaluer l’avancement dans la tâche et calculer les actions à réaliser pour progresser dans cette mission. On parle de boucle perception - action. Dans ce cadre, pour des évolutions en milieu extérieur, la localisation absolue par fusion INS (Inertial Navigation System)/GPS est souvent utilisée. Elle est cependant sujette à des problèmes de robustesse dus au masquage et aux multi-trajets des signaux GPS rencontrés en milieux urbains. Dès lors que les données GPS ne sont pas utilisées, la localisation du robot dans son environnement peut être réalisée alternativement en combinant des mesures de capteurs proprioceptifs (centrales inertielles, odométrie) et des indices visuels perçus par des capteurs actifs (Lidar, camera RGBD) ou passifs (banc stéréo, caméra monoculaire). - Ces techniques sont regroupées sous l’acronyme de SLAM (Simultaneous Localization And Mapping). Un exemple de trajectoire estimée par traitement d’images stéréo – le fil rouge – est présenté en Figure 1. De tels algorithmes sont évalués en terme de dérive en translation et angulaire dans le cadre du projet interne Copernic de l’ONERA. Les meilleurs d’entre eux assurent une dérive inférieure à 1 % de la distance réellement parcourue et des dérives angulaires ne dépassant pas 0,002 ° par mètre parcouru.
Pour définir ses mouvements, le système construit par ailleurs une représentation de l’environnement dans lequel il évolue. Grâce à une estimation précise de la trajectoire de l’engin, il est possible d’agréger dans un repère commun les informations recueillies sur l’environnement au cours du temps. Si l’information est le plus généralement de nature 3D (carte de profondeur stéréo ou RGBD camera ou des nuages de points Lidar), elle peut également contenir une information structurée par objets d’intérêt du type dynamique de l’objet ou classe d’objets (voiture, piéton, arbre …). La Figure 1 illustre le résultat d’une chaîne de modélisation 3D d’environnement en ligne pour engins autonomes développées dans le cadre du projet Copernic. Les relevés 3D instantanés (fournis par le banc stéréo équipant l’engin) sont combinés dans un modèle à base de voxels dont la couleur code la hauteur par rapport au sol.

Fig. 1 : Reconstruction 3D d’un parking par le logiciel 3DSCAN de l’ONERA. Un algorithme de SLAM stéréo est combiné avec un algorithme de reconstruction stéréo dense (en bas à droite) et un modèle 3D global à base de voxels.
Etant donné l’état estimé de l’engin et la représentation géométrique courante sur l’environnement, des algorithmes de contrôle - commande permettent de planifier et d’exécuter les trajectoires optimales au sens de l’objectif de mission suivi. Celui-ci peut être de rallier un point de passage ou d’explorer l’environnement tout en évitant les obstacles. Dans tous les cas, l’objectif est traduit en termes de fonction de coût à optimiser dans l’espace de commande. Ce mécanisme est évidemment dynamique et les trajectoires sûres sont mises à jour régulièrement en tenant compte du modèle d’environnement reconstruit et de l’estimation de la trajectoire effectuée. L’ensemble de ces méthodes de planification de trajectoires pour des missions dans des environnements complexes fait l’objet du projet interne ONERA Azur.
Ces niveaux « sensori-moteur » sont à inscrire dans une structure qui organise l’activité du robot sous une forme autonome. Le système fondateur STRIPS (STanford Research Institute Problem Solver) utilisé pour le contrôle du robot Shakey a posé les fondations sur lesquelles repose encore aujourd’hui l’essentiel des travaux en planification classique.
Des algorithmes de planification déterministes et probabilistes simulant le raisonnement humain ont connu un essor considérable ces dernières années pour prendre en compte des actions à effets incertains et des préférences sur les buts. Les processus décisionnels de Markov (une approche séquentielle de la décision dans l’incertain) ont en particulier servi de base sémantique à certaines des approches proposées pour la planification dans l’incertain.
La coopération d’agents robotiques autonomes
Les problèmes de coopération d’agents robotiques, auxquels des plans explicites leur permettant d’accomplir leurs buts individuels sont fournis, ressemblent pour beaucoup à ceux de petits groupes d’individus, qui doivent coordonner leur activité et sont parfois amenés à négocier entre eux pour résoudre leurs conflits. Alternativement, des approches plus réactives considérant les agents intelligents individuellement, mais sans intelligence collective, permettent d’obtenir un comportement global émergent. On montre en effet que des mécanismes de réaction aux évènements, ne prenant en compte ni une explicitation des buts, ni des mécanismes de planification, peuvent alors résoudre des problèmes qualifiés de complexes par simple interaction.

Fig. 2 : Une mission de navigation d’un robot terrestre assistée par une cartogrophie aérienne : un exemple de scénario de coopération entre des drones de nature hétérogène.
L’ONERA explore à travers le PEA « Action » plusieurs voies de coopération entre des agents robotiques autonomes hétérogènes (drones aériens, terrestres, maritimes, sous-marins) pilotés par l’homme ainsi que des capteurs disséminés ou portés par l’homme. Les méthodes de planification développées visent à produire divers modules qui sont imbriqués suivant la mission considérée :
- stratégies d’exploration de zones : coordination de plusieurs engins autonomes et partage spatial de l’environnement, afin de couvrir au maximum une zone à explorer en vue d’y détecter une ou plusieurs cibles. Ceci inclut la génération de stratégies d’exploration de sous-zones pour un seul engin autonome ;
- stratégies de communication : stratégies d’échange entre engins autonomes de leur connaissance propre de l’environnement et des actions qu’ils envisagent de réaliser. La communication entre deux engins n’étant pas assurée en permanence, les stratégies de communication impliquent la prise en compte de stratégies de déplacement relatif entre engins autonomes ;
- stratégies de suivi de cible : coordination de plusieurs engins autonomes afin de suivre une cible en mouvement. Ces stratégies multi-agents reposent sur les stratégies de déplacement de chaque engin autonome pour suivre la cible ;
- stratégies d’actions globales : actions devant être entreprises au plus haut niveau afin de réaliser une mission donnée. Ces stratégies utilisent tout ou partie des stratégies précédentes.
Les algorithmes de planification développés interviennent à deux niveaux dans le déroulement d’une mission :
- préparation de mission : les stratégies d’actions des engins autonomes sont pré-optimisées hors-ligne avant l’exécution de la mission, sur la base des connaissances sur l’environnement à ce moment-là ;
- replanification en cours de mission : les stratégies d’actions initialement pré-optimisées sont raffinées au fur et à mesure que les connaissances sur l’environnement évoluent ou lorsque des aléas surviennent en cours de mission.
Ces développements ont suscité des travaux plus amont réalisés dans le cadre d’un projet interne à l’ONERA, R2D2, dont le but est de développer des méthodes et des outils pour gérer le déploiement d’une équipe de robots hétérogènes pour des missions d’intervention (surveillance, cartographie, recherche et sauvetage), dans des milieux dynamiques et incertains, tout en apportant des garanties sur la performance et la sûreté du système global. Le projet considère en particulier le développement :
- des algorithmes pour la coopération de robots autonomes hétérogènes : ces outils permettent de synthétiser des plans flexibles, conférant une robustesse à l’exécution et sont également utilisés pour réparer le plan en ligne lorsque des perturbations importantes empêchent son exécution ; la synthèse de ces plans ainsi que leurs réparations se font en respectant des contraintes, temporelles et spatiales, sur l’environnement, le système robotique, la mission à réaliser, et les performances à garantir pour le système ;
- des méthodes et des outils pour la définition et la mise en œuvre d’architectures logicielles embarquées modulaires et reconfigurables qui intègrent des mécanismes de gestion et d’adaptation du plan au niveau de chaque robot ;
- des outils pour analyser et garantir des performances sur l’exécution et la reconfiguration de ces architectures ;
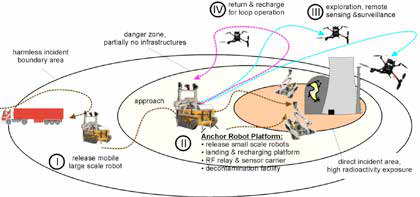
Une partie du middleware issu du projet R2D2 a été mis en œuvre dans le cadre du projet ANR ANCHORS. Ce projet vise à développer des moyens de déploiement de systèmes de gestion de crises exploitant des agents robotiques. Le cœur de ce système s’articule autour d’un réseau de communication regroupant des capteurs sans fil et des mobiles multimédia qui sont appuyés par une flotte de drones volants et communicants et une flotte de robots adaptés aux milieux hostiles (radioactivité, émanations chimiques, ...).

Fig. 3 : Exemple de scénario considéré dans le cadre du projet ANR ANCHORS mettant en œuvre un réseau de capteurs mobiles
(embarqués sur des robots ou sur des drones) communiquant les mesures.
Auteurs
Articles liés par des tags
-
-
- DES AUTOMATES AUX ROBOTS : UNE PERSPECTIVE HISTORIQUEDES AUTOMATES AUX ROBOTS : UNE PERSPECTIVE HISTORIQUE L’histoire des automates puis des robots est étroitement liée au ressenti et à l’imagination des...03 avril 2015Lire la suite >
-
- SYSTÈMES INTELLIGENTS ET CONDUITE DE PROGRAMMESYSTÈMES INTELLIGENTS ET CONDUITE DE PROGRAMME Pour être capables de traiter des situations nouvelles, les robots et plus généralement les systèmes...04 avril 2015Lire la suite >
-
- LA ROBOTIQUE DÉVELOPPEMENTALELA ROBOTIQUE DÉVELOPPEMENTALE La robotique développementale s’inspire de travaux en biologie et en psychologie du développement...05 avril 2015Lire la suite >
-
- APPRENDRE POUR ÊTRE ENCORE PLUS HUMANOÏDEAPPRENDRE POUR ÊTRE ENCORE PLUS HUMANOÏDE Pour sortir des laboratoires où ils sont aujourd’hui cantonnés et venir s’installer chez nous, les...06 avril 2015Lire la suite >
-
- ETHIQUE DES ROBOTS : SANS LIMITESETHIQUE DES ROBOTS : SANS LIMITES La frontière entre l’acceptable et l’inacceptable est souvent dépendante des modes et des époques :...10 avril 2015Lire la suite >
-
- CONCEPTION DES ARMES ET VOLONTÉ SOCIALECONCEPTION DES ARMES ET VOLONTÉ SOCIALE De plus en plus, l’emploi des armements se décide et s’inscrit dans des situations où combats...11 avril 2015Lire la suite >
-
- PERMIS DE TUER ?PERMIS DE TUER ? Au cours de ses différentes affectations, l’auteur a appris à maîtriser la langue de bois tout en...12 avril 2015Lire la suite >
-
- « ROBOTS-TUEURS » : QUEL ENCADREMENT JURIDIQUE ?« ROBOTS-TUEURS » : QUEL ENCADREMENT JURIDIQUE ? L’organisation non-gouvernementale (ONG) Human Rights watch a lancé printemps 2013 une campagne de...13 avril 2015Lire la suite >
-
- GENTILS ROBOTS, MÉCHANTS ROBOTS ?GENTILS ROBOTS, MÉCHANTS ROBOTS ? Le 21ème siècle sera-t-il le siècle des robots ? de nombreux auteurs de science-fiction l’ont...15 avril 2015Lire la suite >
-
- SPIN-OFF DU LRBA À L’ORIGINE DE LA NAVIGATION MAGNÉTO-INERTIELLESPIN-OFF DU LRBA À L’ORIGINE DE LA NAVIGATION... En proposant des équipements de géolocalisation en environnement GPs-denied pour un coût 50 fois...16 avril 2015Lire la suite >
-
- FCAS, VERS L’ÈRE DES DRONES DE COMBAT ?FCAS, VERS L’ÈRE DES DRONES DE COMBAT ? Notifiée le 30 octobre 2014, la phase de faisabilité du projet fcas (Future Combat Air System)...17 avril 2015Lire la suite >
-
- LA GUERRE DES MINES NAVALESLA GUERRE DES MINES NAVALES Si, dans le domaine naval, les drones comprendront bien entendu des vecteurs aériens, une autre...18 avril 2015Lire la suite >
-
- CE QUE VEUT L’INTERNAUTECE QUE VEUT L’INTERNAUTE Le web moderne a vu les applications à la robotique et à l’intelligence artificielle exploser....19 avril 2015Lire la suite >
-
- EXPERTISE ROBOTIQUE TERRESTREEXPERTISE ROBOTIQUE TERRESTRE Depuis début janvier, nous sommes 14 IA (X 2010) à suivre notre formation administrative et...20 avril 2015Lire la suite >
-
- SANS LA ROBOTIQUE, PAS DE SPATIALSANS LA ROBOTIQUE, PAS DE SPATIAL Les lanceurs, les satellites ou les sondes interplanétaires possèdent tous des senseurs, des...21 avril 2015Lire la suite >
-
- LE NAVAL AU SERVICE DU SPATIALLE NAVAL AU SERVICE DU SPATIAL Le Véhicule de transfert automatique (ATV) développé par l’agence spatiale européenne (ESA), est...22 avril 2015Lire la suite >
-
-
- ROSETTA & PHILAE, DEUX CONCEPTIONS TRÈS DIFFÉRENTESROSETTA & PHILAE, DEUX CONCEPTIONS TRÈS DIFFÉRENTES A plus de un milliard d’euros, le véhicule rosetta de plus de 3 tonnes est le fruit d’une...24 avril 2015Lire la suite >
-
- LE TRANSPORT EN 2050 : UN ESSAIM DE ROBOTS ?LE TRANSPORT EN 2050 : UN ESSAIM DE ROBOTS ? Que sera le transport en 2050 ? La voiture, si chère (dans tous les sens du terme) à bon nombre...25 avril 2015Lire la suite >




















Aucun commentaire
Vous devez être connecté pour laisser un commentaire. Connectez-vous.