


L’ÉVOLUTION DES INTERFACES DE PILOTAGE POUR HÉLICOPTÈRES
Depuis les débuts de l’hélicoptère, de multiples adaptations ont peu à peu déchargé l’humain des tâches élémentaires afin de l’assister dans ses actions à plus haute valeur ajoutée, du secours en montagne à la lutte anti-sous-marine. La machine est-elle en passe de remplacer le pilote ?
La tâche imposée à l’équipage d’un hélicoptère est particulièrement complexe. Elle réside dans la charge de pilotage due à l’instabilité et aux couplages naturels de la machine, comme dans la quantité de paramètres de vol et de fonctionnement à surveiller.
Des études approfondies, s’appuyant sur la simulation pilotée, ont été menées pour réduire la charge de travail de l’équipage. Elles ont abouti aux architectures « glass cockpit » des années 1990 encore en service aujourd’hui : écrans multi-fonctions avec commandes centralisées. Sur le Tigre et le Caïman, les visualisations « tête haute » (viseurs de casque) offrent une meilleure perception de l’environnement, en affichant les informations de vol et de mission directement dans le champ de vision.
D’abord une assistance au pilotage
Succédant aux dispositifs élémentaires d’aide au pilotage apparus dès les années 1970 (stabilisation, régulation moteur, maintien de paramètres de vol), les systèmes d’assistance sont devenus plus performants mais aussi plus fiables (auto-surveillance et redondance). Ils réalisent des trajectoires évoluées ainsi que la transition automatique entre différentes phases de vol : navigation, approche, stationnaire. Une intervention humaine n’est plus nécessaire qu’en cas de défaillance multiple.
Tout en augmentant le niveau de sécurité, ces évolutions ont rendu possible le travail en équipage à deux dans les conditions les plus difficiles (mauvaise visibilité, faible luminosité, turbulences). Assisté dans les actions élémentaires, le pilote peut assurer seul la conduite du vol dans son ensemble, ainsi que l’auto-protection de l’appareil ; le co-pilote se charge de la gestion de la situation tactique et du système d’armes, ne prenant le relais du pilote qu’en dernier recours.
Exemple du mode « Helipad Take Off »
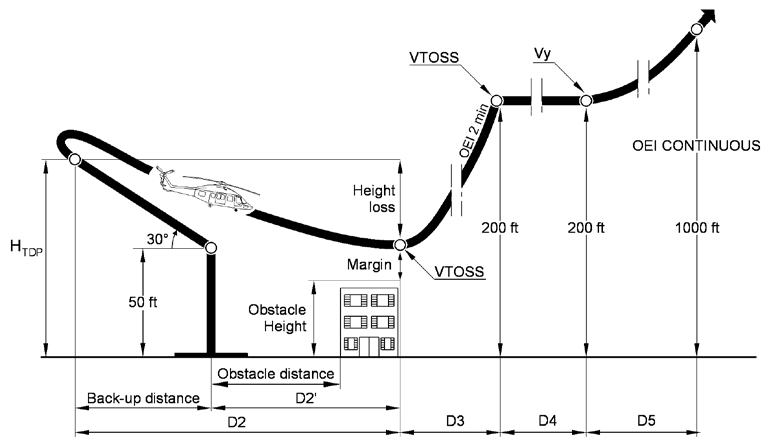
L’objectif est ici d’effectuer un décollage à partir d’un « helipad » proche d’un obstacle. L’équipage configure au préalable le type de décollage souhaité. Le mode automatique est armé à la mise en stationnaire au sol, puis activé sur commande pilote. Le système élabore les portions de trajectoire selon les performances estimées : montée verticale de 50 pieds puis vers l’arrière pour conserver la vue sur l’helipad jusqu’au point de décision (TDP). En cas de panne moteur avant ce point l’appareil est ramené automatiquement vers l’helipad. À partir du TDP, le système passe en mode décollage. En cas de panne moteur, il accélère jusqu’à la vitesse qui garantit une trajectoire de montée à la puissance mono-moteur (One Engine Inoperative) maximale limitée à 2 min. Dès la hauteur de 200 pieds atteinte, le mode accélère jusqu’à la vitesse de montée optimale Vy à la puissance OEI continue.
Automatiser les phases de vol
La plus récente génération d’appareils, dotés par exemple de l’avionique modulaire Helionix (Airbus), vise à maximiser la « conscience de la situation » : visualisation des paramètres classiques de vol avec une représentation synthétique du terrain environnant, alertes de proximité du relief, des obstacles ou d’autres aéronefs. Les assistances au pilotage peuvent réaliser des trajectoires complexes, comme l’évitement des abordages ou plus récemment la gestion de panne moteur au décollage.
Dans ces phases de vol automatique, le rôle du pilote se limite à la supervision du système : il n’intervient plus qu’en état très dégradé imposant le pilotage manuel et attentif. Dans ce cas, une aide à la stabilisation reste toujours active pour modérer sa charge de travail. Ces évolutions ont conduit à la généralisation du vol mono-pilote dans les opérations civiles.
Vers une révolution du concept de pilotage ?
La règlementation repose pourtant encore sur le même principe qu’il y a 40 ans : l’appareil doit rester contrôlable sans assistance dans l’ensemble de son domaine de vol. Les paramètres essentiels de pilotage sont par conséquent toujours affichés, et malgré leurs progrès constants, les systèmes d’assistance conservent leur caractère facultatif. Cela s’explique principalement par leur fiabilité insuffisante, limitée par les coûts et par l’intégration à bord (masse et volume).
Cockpit de NH90 Caïman (© Marine Nationale, 2020)
Depuis 2010 des recherches ont été menées pour intégrer des lois dites « par objectifs » et des interfaces simplifiées, dans une architecture issue des commandes de vol électriques développées pour le Caïman. Le principe est de garantir pendant tout le vol un niveau d’assistance constant, même dans les états les plus dégradés. Cela consiste à convertir des actions simples de l’opérateur en ordres de pilotage évolués, jusqu’ au vol totalement autonome. Les visualisations peuvent se limiter aux informations relatives à la navigation : la traditionnelle boule laisse enfin sa place à une carte numérique au centre d’un seul grand écran multi-fonctions. Les moyens de commande sont allégés : mini-manches et écran tactile. L’opérateur n’est alerté qu’en cas de défaillance impliquant une modification des objectifs du vol (dans le pire des cas, déroutement vers le terrain le plus proche). Ce nouveau concept de pilotage, évalué en vol en 2023, pourrait être étendu à une partie de la gamme civile et militaire, à commencer par le Caïman (Block 2).
Le pilote serait alors déchargé de son rôle traditionnel au profit des tâches de planification, d’analyse et de prise de décision, dans lesquelles la compétence humaine prend toute sa mesure. La mise au point de ce « pilote artificiel » devra s’appuyer largement sur l’expérience accumulée par les pilotes humains. Ce sera l’enjeu majeur d’un tel développement et des essais en vol qui l’accompagneront.

Cockpit de SA330 Puma (© Airbus Helicopters, 1996)

Essais en vol de « lois par objectif » sur H130 « Flight Lab »

Architecte de simulation hélicoptère puis responsable d’essais de qualification de systèmes embarqués au Centre d’Essais en Vol (Istres).
Ingénieur recherche & développement « assistance au pilotage », Airbus Helicopters
Auteur

Articles liés par des tags
-
- LE FACTEUR HUMAIN À LA DGALE FACTEUR HUMAIN À LA DGA Dans le monde des ingénieurs de l’armement, ceux qui sont passés par cette spécialité se comptent...04 mars 2024Lire la suite >
-
- COMPLEXITÉ DE LA SIMPLICITÉCOMPLEXITÉ DE LA SIMPLICITÉ Si la simplicité est souvent invoquée en conception des IHM, elle souffre d’une sous-définition...05 mars 2024Lire la suite >
-
- QUAND LE CERVEAU PREND LES AILESQUAND LE CERVEAU PREND LES AILES Dans l’arène aéronautique, où les avancées technologiques redéfinissent en permanence les règles du...06 mars 2024Lire la suite >
-
- LA SIMULATION, UN OUTIL D’ERGONOMIE PROSPECTIVELA SIMULATION, UN OUTIL D’ERGONOMIE PROSPECTIVE L’interopérabilité et l’intelligence artificielle (IA) sont en passe de devenir des clefs...07 mars 2024Lire la suite >
-
- RÉDUCTION DES ÉQUIPAGES : UNE INGÉNIERIE DÉLICATERÉDUCTION DES ÉQUIPAGES : UNE INGÉNIERIE DÉLICATE Pour faire face à la baisse de ses effectifs, la Marine nationale a fait le choix d’une rupture dans...08 mars 2024Lire la suite >
-
- L’HUMAIN, SEUL SYSTÈME QU’IL EST INTERDIT DE MODIFIERL’HUMAIN, SEUL SYSTÈME QU’IL EST INTERDIT DE MODIFIER L’ingénieur « facteurs humains » est une compétence rare et pourtant cruciale pour bien prendre en...09 mars 2024Lire la suite >
-
- MAN MACHINE TEAMINGMAN MACHINE TEAMING Un avion de combat n’emporte qu’un ou deux membres d’équipage, avec ses capacités cognitives qui ne...11 mars 2024Lire la suite >
-
- VERS L’OPÉRATEUR SUPERVISEURVERS L’OPÉRATEUR SUPERVISEUR La conception centrée utilisateur est intégrée dans le processus de conception de Nexter / KNDS...12 mars 2024Lire la suite >
-
- SOPHISTICATION DES ÉQUIPEMENTS DU FANTASSINSOPHISTICATION DES ÉQUIPEMENTS DU FANTASSIN Jusqu’à quel point la sophistication technologique des équipements et des systèmes d’armes est-elle...13 mars 2024Lire la suite >
-
- ÉLECTROENCÉPHALOGRAMME RETOUR VERS LE FUTUR ?ÉLECTROENCÉPHALOGRAMME RETOUR VERS LE FUTUR ? L’utilisation d’un électroencéphalogramme (EEG) exploitable date du début du XXe siècle. Depuis,...14 mars 2024Lire la suite >
-
- LES FACTEURS HUMAINS DANS LES ACCIDENTS AÉRIENSLES FACTEURS HUMAINS DANS LES ACCIDENTS AÉRIENS Le taux d’accidents aériens a été divisé par 10 en 25 ans. La part de facteurs humains a pu être...15 mars 2024Lire la suite >
-
- RÉGULER L’AVERSION AU RISQUE EN PYROTECHNIE PAR SON ÉVALUATIONRÉGULER L’AVERSION AU RISQUE EN PYROTECHNIE PAR SON... La sécurité de nos munitions est une priorité absolue, mais l’aversion au risque en service pénalise...16 mars 2024Lire la suite >
-
- IA ET FACTEURS HUMAINSIA ET FACTEURS HUMAINS " IA et facteurs humains... je le vois venir, ça finira encore au point Godwin de l’IA de défense,...17 mars 2024Lire la suite >
-
- TON IA TE CONNAÎT-ELLE VRAIMENT ?TON IA TE CONNAÎT-ELLE VRAIMENT ? Choisir n’est pas un acte raisonné, c’est avant tout un modèle centré sur l’émotion. Sans émotion,...18 mars 2024Lire la suite >
-
- L’HUMANITÉ DOIT RESTER AUX COMMANDES DE L’IAL’HUMANITÉ DOIT RESTER AUX COMMANDES DE L’IA Les avancées de l’IA surprennent. Ses applications semblent déborder le fleuve de spéculations...19 mars 2024Lire la suite >
-
- NOUS PORTONS LA VOIX DE L’UTILISATEURNOUS PORTONS LA VOIX DE L’UTILISATEUR Comment ? En développant notamment des systèmes qui intègrent les exigences humaines grâce à une...20 mars 2024Lire la suite >
-
- À QUEL MOMENT UN ÉCHANGE DEVIENT-IL UNE RELATION ?À QUEL MOMENT UN ÉCHANGE DEVIENT-IL UNE RELATION ? Dans notre civilisation hyper-connectée, sommes-nous réellement en relation les uns avec les autres...21 mars 2024Lire la suite >

















Aucun commentaire
Vous devez être connecté pour laisser un commentaire. Connectez-vous.